짐벌락 없는 Yaw Pitch Roll 각도 출력 6축 자이로 센서 개발키트
본 제품은 짐벌락 없이 Yaw Pitch Roll 각도를 출력할 수 있는 6축 자이로 센서 개발키트입니다.
보통의 자이로 센서는 짐발락으로 인하여 운동 모션을 표현하기에는 비좁은 영역입니다. 이 센서는 전방위 움직임에 대하여 표현가능합니다. 본 제품은 앞서서 공개하여 판매중인 자이로 센서 (https://www.nano-i.com/sales/1272665) 의 후속 모델입니다. 쿼터니언을 사용하여 짐벌락이 없는 YAW PITCH ROLL 출력 각도를 구현하였습니다.
본 제품은 로봇 등 관절의 움직이는 각도를 Pitch 각도로 표현가능하며, 360도 다 표현 가능합니다. YAW 도 360도 전방위 표현이 가능하며, 동서남북의 회전 위치를 표현하여 길의 방향을 잃어버리지 않게 하므로 드론 등에 응용 가능합니다. 그리고 ROLL 은 수평면 대비 어느 정도로 좌우로 기울어져 있는지 좌로 90도 오른쪽으로 90도, 합하여 180도 표현 가능합니다...기계 장치의 수평면 등을 조절하는데에도 응용 가능합니다. PITCH 는 ROLL 각도만큼 수평대비 왼쪽이나 오른쪽으로 기울어져 있어도 앞뒤 방향으로 회전한 각도를 정확히 측정합니다.
연락처 : 010-4293-9577, e-mail : nano@nano-i.com
*** 짐벌락 (Gimbal lock)
짐벌락은 3차원 공간상에서 한 개의 자유도를 잃어버리는 현상으로, 3개의 짐벌 중 두개의 축이 서로 평행한 상태가 되어, 회전 시스템이 2차원 공간으로 잠기는 현상입니다. 삼차원 공간 내의 세 개의 짐벌은 각각의 서스펜션 축에 대해 자유롭게 회전 할 수 있으나, 그럼에도 불구하고, 2 개의 짐벌 축의 평행 배향으로 인해 하나의 축을 따라 회전을 수용 할 수 있는 짐벌이 없는 현상을 의미합니다.
***응용 분야 : 로봇, 건설 장비 (굴삭기의 작업 관절의 각도 표현..), 기계 장치, 기타
1. 부품 내용.
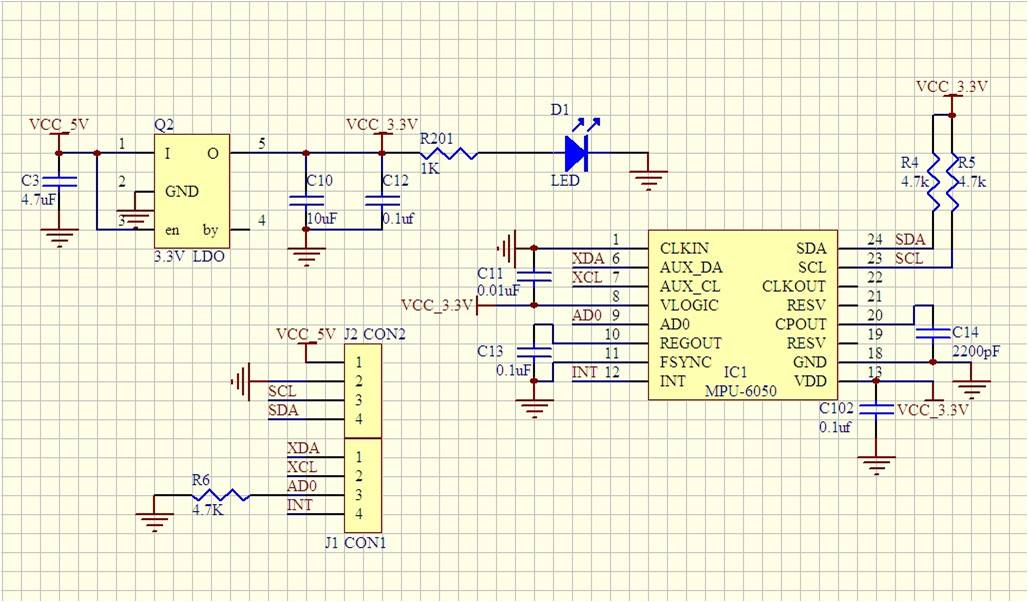
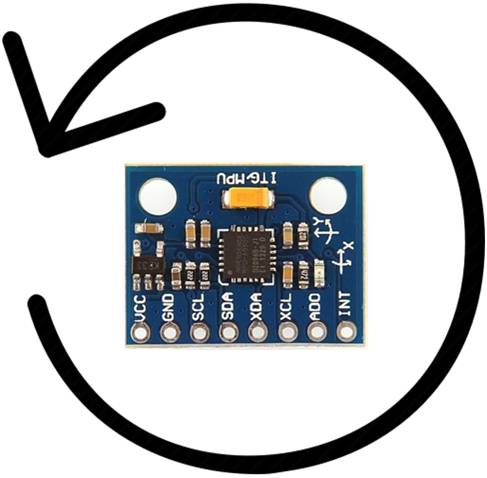
가) MPU6050 자이로 센서 및 interface circuit (회로도 포함)
|
|

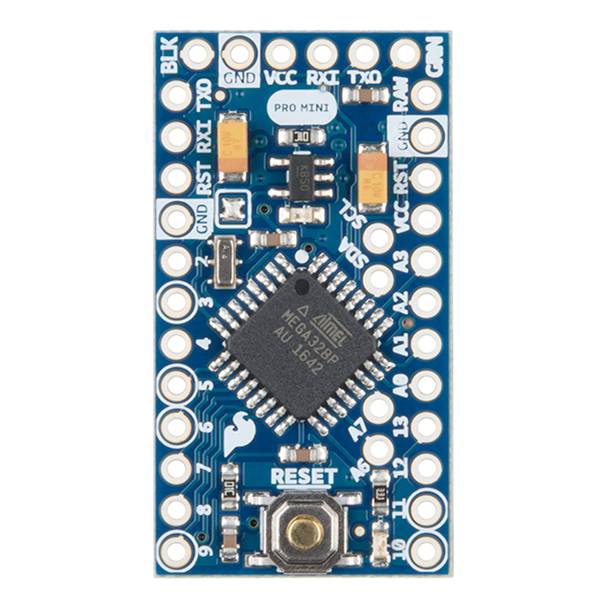
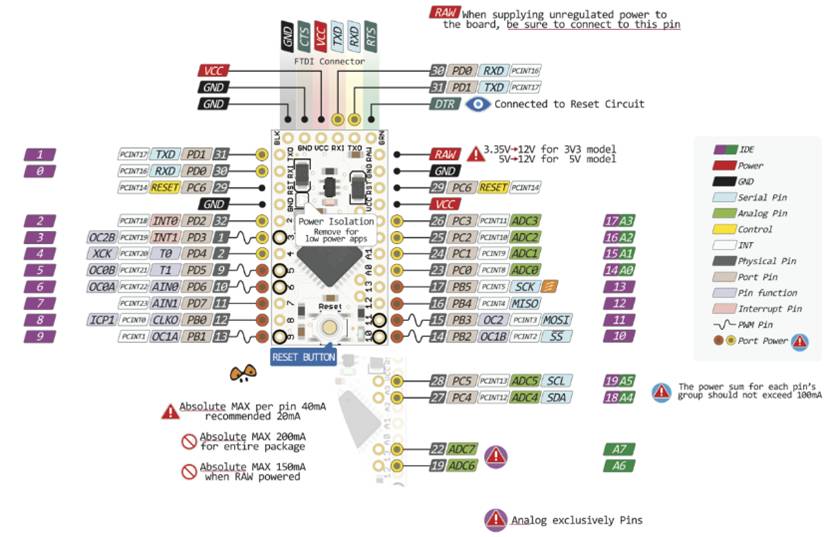
다) MCU 회로 보드 (아두이노)
|
|
2. 조립 구성품 성능 시연
3. 아래는 위 동영상에서 표현되는 출력 데이터에 대한 설명입니다.
가) 위 왼쪽 동영상은 자이로 센서의 YAW PITCH ROLL 출력을 설명하고 있습니다.
YAW : 360도 전방위 표현 가능한데 동서남북의 회전 위치를 표현하여 길의 방향을 잃어버리지 않게 합니다. 단, 본 MPU6050 센서에는 지자기 센서가 없어서 YAW 각도는 한 시간에 약 15도 정도의 지구 자전 방향으로 회전됩니다.
PITCH : 0~180도 (위로), 0~-180도 (아래로) 표현되며, 관절의 각도 등을 표현할 때 쓰입니다. ROLL 각도가 주어진 상태(예: 장비가 기울어진 상태) 에서도 피치각을 정확하게 표현합니다.
ROLL : 장비가 수평면 대비 어느 정도로 좌우로 기울어져 있는지 여부를 알 수가 있으며, 좌로 90도 (0~90) 오른쪽으로 90도 (0~-90), 합하여 180도 표현 가능합니다.
주변의 자성에 만감한 자석 등 지자기 센서를 사용할 수 없을 때, 예를 들면 굴삭기 등 장비에 자석을 달아서 자이로 센서를 부착하는 용도, 로봇의 움직이는 각도인 관절을 표현할 때 쓰입니다.
|
|
|
|
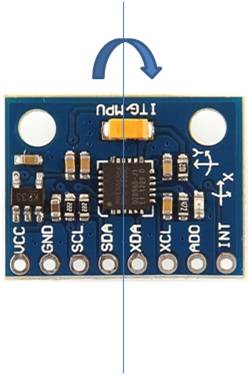
| YAW (회전축 : Z) |
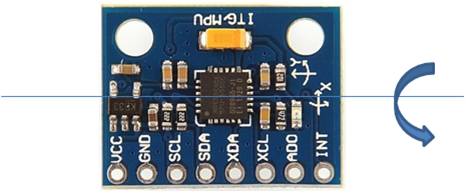
PITCH (회전축 : Y) |
ROLL (회전축 : X) |
나) 위 오른쪽 동영상은 각도 표현 능력이 0.01 도가 가능함을 보여주고 있습니다.


Articles



Designed by sketchbooks.co.kr / sketchbook5 board skin
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5